ITTROV - Conclusions and Recommendations
Conclusions and Recommendations
Structural Design and Integration (Tom Gros)
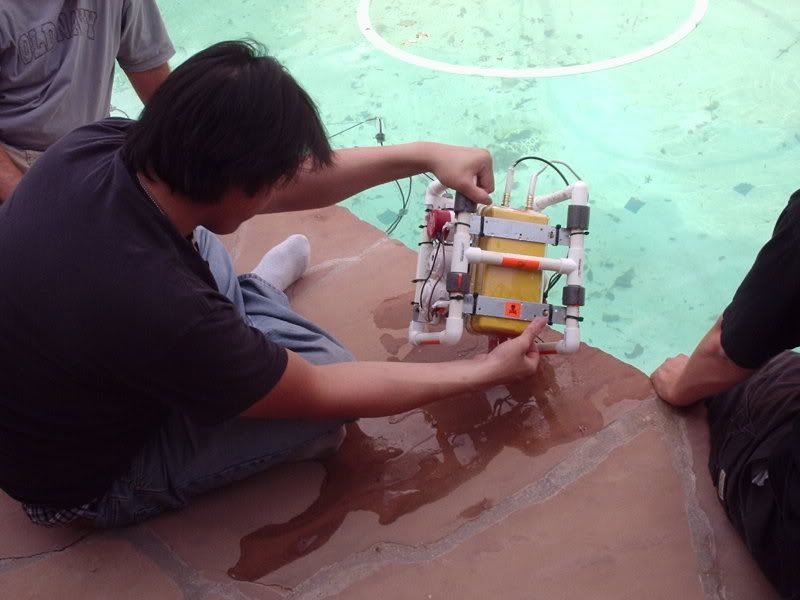
Overall, in terms of structural performance, Project ROV-ITT functioned better than I personally anticipated. It was surprisingly buoyant and maneuverable in the water considering its weight and lack of aerodynamic design.
My primary concern from the onset was the shear weight of the ROV would simply sink it with no chance of maneuvering or surfacing. I reached this conclusion due to fact that the buoyancy of the watertight case was rated at 1.5 lbs. The craft, at 7.5 lbs, far exceeded that rating. Not only did the ROV not sink when it was introduced to the water—it floated to the point where it became necessary to drill holes into the PVC frame in order to provide ballast. In my initial determination, I did not take into consideration the astounding buoyancy of PVC. With the frame now taking on water, all that was required to operate the craft was to add a few pieces of Styrofoam to trim the position of the ROV—that is to position it horizontally in the water.
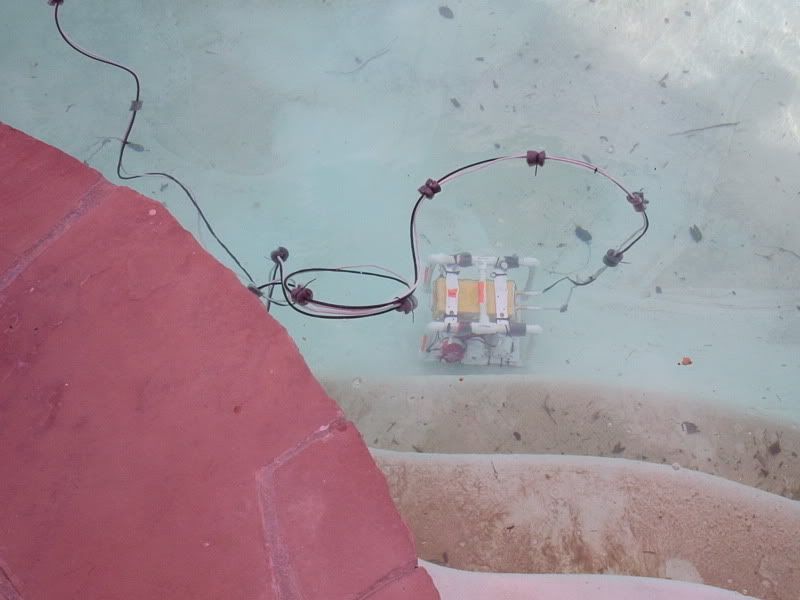
As far as maneuverability is concerned, the ROV also exceeded my expectations, barring two issues—surfacing and veering left while moving forward. The problem of surfacing was not completely resolved even when a second bilge pump was dedicated to the effort. At a certain depth, the water pressure was simply too great to overcome. In my mind this issue could be overcome in one of two ways. The first would involve a pressure sensor that would automatically turn on the bilge pumps responsible for upward thrust when a critical depth was reached. The second solution would entail replacing the impellers built into the bilge pumps with external propellers designed for thrust.
The fact that the craft consistently veered left, despite our best efforts to rectify the situation, is undoubtedly due to the total disregard to aerodynamics in the design. The solution may lie in the attachment of a bow to the frame—although this may create an unacceptable amount of drag. Electronically, the resolution might be more achievable. If there were a way to control the speed of each motor individually, the veering could easily be eliminated.
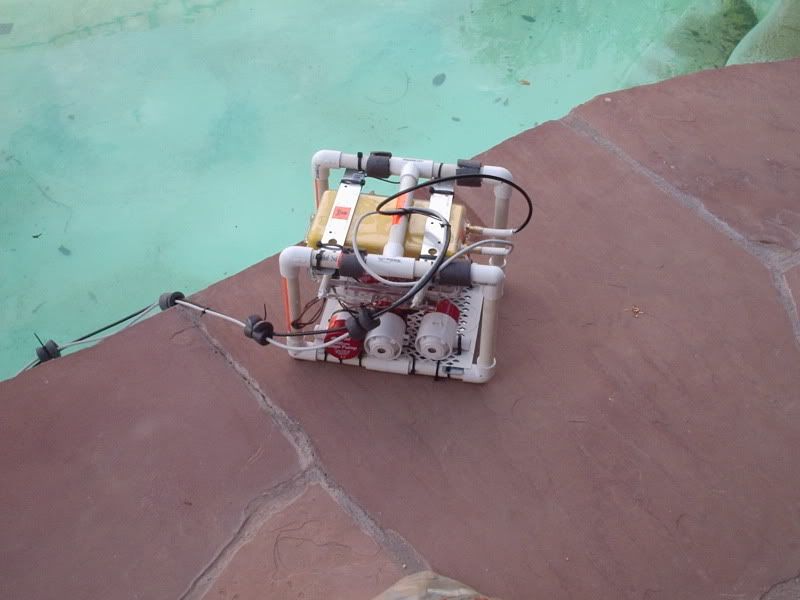
Perhaps, the biggest disappointment was the amount of leakage that occurred. Although water penetration could have occurred in any of the six ports used to route wiring into the housing, in my mind, the most likely culprit is the case itself. Although the manufacturer claims that the case is waterproof, it is designed to keep electronic equipment dry in cases of accidental exposure to water. Our application required prolonged exposure not only to water, but also water pressure since the ROV was intended to remain submerged for extended periods of time. Any future applications of this design would have to address this problem.
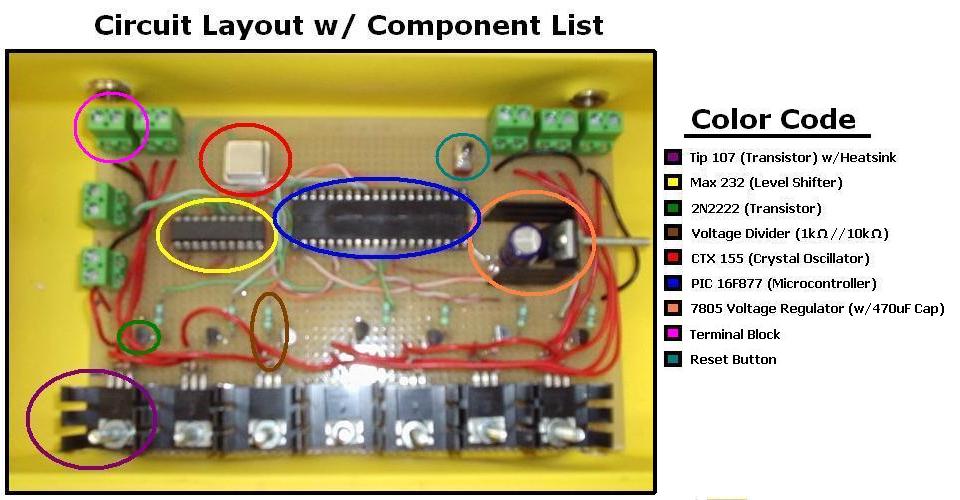
Software and Electronic Design for ROVITT (Emery Premeaux)
There is plenty of code space and I/O left on the PIC for more features. Using the standard ASCII character set for command input leaves a lot of room. For instance, the operator could press‘t’ to get back water temperature. Capital T could return a second temperature, or something else. P might request a pressure reading. In addition, the PIC has a built in timer, so it could be set up to automatically send information, sort of like a heartbeat. It could respond every two seconds with a temp and pressure message. To continue with the heartbeat analogy, the topside software could be written such that if this message is not received on time, a warning is displayed indicating that the ROV is not in communication.
Other features might include a water temperature sensor and a depth gauge. Another idea might be a device similar to an aerometer to gauge the speed of the sub. Perhaps a leak detector could be included to warn the controller of water intrusion.
Structural Design and Integration (Tom Gros)
Overall, in terms of structural performance, Project ROV-ITT functioned better than I personally anticipated. It was surprisingly buoyant and maneuverable in the water considering its weight and lack of aerodynamic design.
My primary concern from the onset was the shear weight of the ROV would simply sink it with no chance of maneuvering or surfacing. I reached this conclusion due to fact that the buoyancy of the watertight case was rated at 1.5 lbs. The craft, at 7.5 lbs, far exceeded that rating. Not only did the ROV not sink when it was introduced to the water—it floated to the point where it became necessary to drill holes into the PVC frame in order to provide ballast. In my initial determination, I did not take into consideration the astounding buoyancy of PVC. With the frame now taking on water, all that was required to operate the craft was to add a few pieces of Styrofoam to trim the position of the ROV—that is to position it horizontally in the water.
As far as maneuverability is concerned, the ROV also exceeded my expectations, barring two issues—surfacing and veering left while moving forward. The problem of surfacing was not completely resolved even when a second bilge pump was dedicated to the effort. At a certain depth, the water pressure was simply too great to overcome. In my mind this issue could be overcome in one of two ways. The first would involve a pressure sensor that would automatically turn on the bilge pumps responsible for upward thrust when a critical depth was reached. The second solution would entail replacing the impellers built into the bilge pumps with external propellers designed for thrust.
The fact that the craft consistently veered left, despite our best efforts to rectify the situation, is undoubtedly due to the total disregard to aerodynamics in the design. The solution may lie in the attachment of a bow to the frame—although this may create an unacceptable amount of drag. Electronically, the resolution might be more achievable. If there were a way to control the speed of each motor individually, the veering could easily be eliminated.
Perhaps, the biggest disappointment was the amount of leakage that occurred. Although water penetration could have occurred in any of the six ports used to route wiring into the housing, in my mind, the most likely culprit is the case itself. Although the manufacturer claims that the case is waterproof, it is designed to keep electronic equipment dry in cases of accidental exposure to water. Our application required prolonged exposure not only to water, but also water pressure since the ROV was intended to remain submerged for extended periods of time. Any future applications of this design would have to address this problem.
Software and Electronic Design for ROVITT (Emery Premeaux)
There is plenty of code space and I/O left on the PIC for more features. Using the standard ASCII character set for command input leaves a lot of room. For instance, the operator could press‘t’ to get back water temperature. Capital T could return a second temperature, or something else. P might request a pressure reading. In addition, the PIC has a built in timer, so it could be set up to automatically send information, sort of like a heartbeat. It could respond every two seconds with a temp and pressure message. To continue with the heartbeat analogy, the topside software could be written such that if this message is not received on time, a warning is displayed indicating that the ROV is not in communication.
Other features might include a water temperature sensor and a depth gauge. Another idea might be a device similar to an aerometer to gauge the speed of the sub. Perhaps a leak detector could be included to warn the controller of water intrusion.
posted by MRE at 1:00 AM
0 comments
![]()